Samolot RC – multiTASK
Samolot powstał na bazie zestawu firmy Volantex Ranger na potrzeby badań nad Internetem Rzeczy w CI TASK.
| napęd | silnik SK3 - 3542-800KV |
| zasilanie | pakiet 4S 5Ah (napęd), pakiet 3S 800mAh (wideo) |
| masa | 3300g |
| rozpiętość | 1980 mm |
| długość kadłuba | 1170 mm |
| kamera | Płytkowa FPV, micro FPV, termowizyjna Flir |
| tor wideo | Boscam FPV |
Samolot jest stosunkowo łatwy w pilotażu ale ma parę wad, które mogą go dyskwalifikować jako pierwszy model do nauki latania:
- jest bardzo wrażliwy na położenie środka ciężkości – przy tak wysokim podwoziu (mój ma dodatkowo powiększone koła) i wysoko zamontowanym silnikiem przy mocnym dodaniu gazu przy starcie kładzie się „na mordę”. Przy zbyt przednim położeniu środka ciężkości ma problem aby się oderwać nawet pomimo maksymalnie wychylonego steru wysokości. Przy pierwszych startach miałem ustawiony ŚC tak jak piszą w instrukcji i dało się wystartować. Ale nawet 5mm do przodu skutkowało problemami ze startem. Obecnie środek mam przesunięty ok 5mm do tyłu względem tego co podaje instrukcja i jest to jak na razie najlepsza opcja
- „mechanizacja” płata dużo daje – lekkie wychylenie klap na startu (ok 5%) bardzo wyraźnie skraca rozbieg, wychylenie klap na maksa w dół umożliwia bardzo strome podejście do lądowania, samo lądowanie na klapach z lekką „szprycą” gazem przed przyziemieniem również jest bajecznie proste
- Przy starcie trzeba uważać na operowanie sterem kierunku – silna struga za śmigłowa znacznie podnosi skuteczność steru kierunku i trzeba po prostu o tym pamiętać
- w locie przy zakrętach trzeba pamiętać o wychylaniu steru kierunku (albo zmiksowaniu z lotkami). Sam lot jest bardzo stabilny i przewidywalny
- mocowanie podwozia nie sprawie wrażenia zbyt solidnego, ale pomimo kilkukrotnych wyjechań z pasa w trawę na pełnej prędkości nich się nie urwało. Pogięte golenie można łatwo naprostować nawet na polu;-)
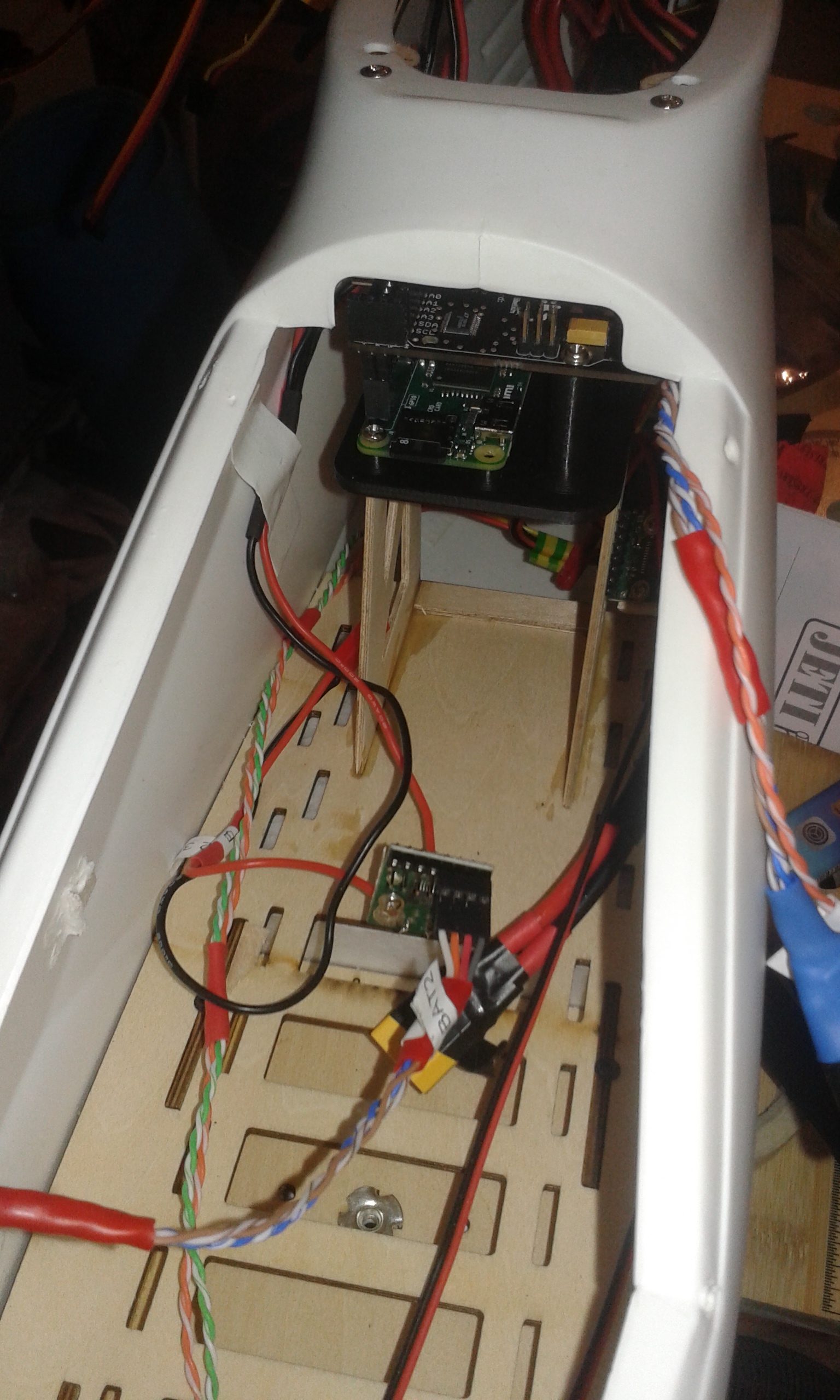
Na podkładzie samolotu zainstalowany został miniaturowy komputer RaspberryPi Zero z procesorem o szybkości zegara 1 GHz i 512 MB pamięci operacyjnej. Do komputera podłączony został moduł nadawczy sieci LoRaWAN. Samolot został wyposażony w czujniki ciśnienia i temperatury, żyroskop, magnetometr, prędkościomierz atmosferyczny, czujniki natężenia prądu oraz odbiornik systemu GPS. Autorskie oprogramowanie analizuje na bieżąco wszystkie parametry odczytywane z czujników monitorując parametry lotu. Oprócz tego dane w określonych interwałach czasowych, wraz z odpowiadającymi im koordynatami GPS, przesyłane są przez sieć LoRaWAN na ziemię, gdzie istnieje możliwość podglądu i ich dalszej analizy. Samolot przystosowany jest również do zainstalowania dodatkowych czujników mierzących inne parametry środowiskowe jak np. jakość powietrza, jego wilgotność czy przejrzystość. Architektura systemu operacyjnego przewiduje również możliwość wprowadzenia analizy obrazu z kamery termowizyjnej pod kątem np. wyszukiwania określonych obiektów w terenie.
Model pierwsze loty wykonywał na lotnisku w Pruszczu Gdańskim, ale z powodzeniem startował również z trawy na polu w Chwarznie.












Zobacz również

Bushmule – model RC

Supermarine Spitfire VB – Hobby Boss 1/32
